芝浦工業大学が非破壊検査技術「InSIGHT Grip」を開発、把持と内部状態検査を同時に実現
記事配信日:
2026/01/29 10:00 提供元:ぷれにゅー
芝浦工業大学システム理工学部の桑原央明准教授率いる研究チームが、ロボットハンドによる非破壊検査技術「InSIGHT Grip」を開発しました。
概要
項目名:InSIGHT Grip詳細:「把持(つかむ)」と「検査(知る)」を同時に行う新たな非破壊検査技術
開発者:芝浦工業大学システム理工学部の桑原央明准教授
概要:高価な力覚センサーを必要とせず、対象物を優しくつかみ、その内部状態をリアルタイムで推定
詳細URL:https://www.shibaura-it.ac.jp/
新技術「InSIGHT Grip」について
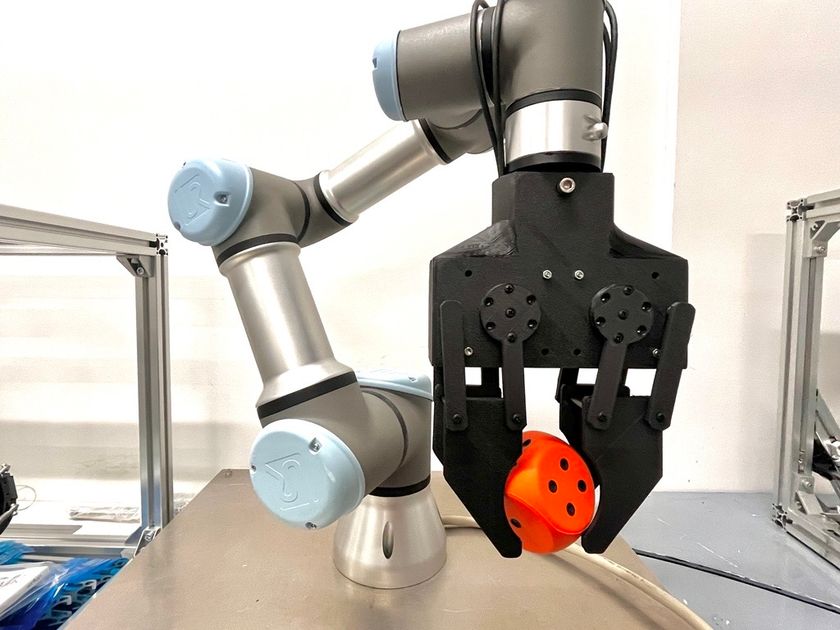
InSIGHT Gripは、モーター情報のみで把持力と加振を制御することを可能にした画期的な技術です。従来は別々に行われていた作業工程と検査工程の一体化が可能になり、生産現場での時間とコストを削減するのに寄与します。「つかむ・測る・知る」を一体化へ
本技術は、最小2つのモーターで駆動するコンパクトなロボットグリッパーによって構成されています。高価な力覚センサーを必要とせず、対象物を優しくつかむ制御と、微細な振動を与える加振制御を同時に行うことができる点が特長です。次世代の触覚インフラを目指して
この成果は、「第20回わかしゃち奨励賞 応用研究部門」で優秀賞を受賞しました。これからは本技術の社会実装に向けた取り組みを進め、産業界の共通基盤として確立することを目指します。まとめ
InSIGHT Gripは、把持と検査を一体化させることで、生産現場でのコスト削減と作業効率向上に寄与する技術です。社会実装に向けてさらなる研究が進められており、農業から工業、医療、建設分野といった多様な領域での展開が期待されています。関連リンク
芝浦工業大学公式サイト:https://www.shibaura-it.ac.jp/配信会社から提供を受けたコンテンツやプレスリリースを原文のまま掲載しており、J-CASTニュースが制作した記事ではありません。お問い合わせは配信会社・プレスリリースの配信元にお願いいたします。